 1 / 3
1 / 3Ernteroboter




Hardwarepreis:
DOF
5
Maximale Nutzlast
0,5
kg
Maximale Geschwindigkeit
0,05
Meter pro Sekunde
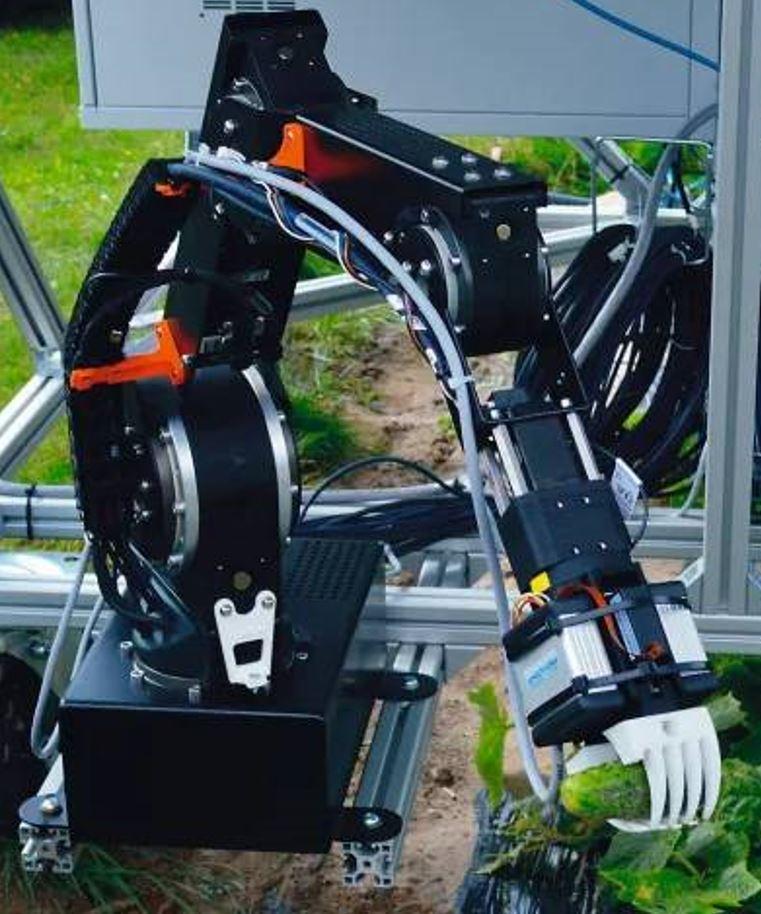
Catch-Prototyp: Automatisierte Gurkenernte mit Robolink-Robotern
Die Gurkenernte stellt aufgrund der grünen Umgebung eine besondere Herausforderung dar, da Gurken schwer zu erkennen und zu separieren sind. Um dem Arbeitskräftemangel entgegenzuwirken und die Effizienz zu steigern, wurde der Catch-Prototyp im Rahmen eines 18-monatigen Forschungsprojekts entwickelt. Mit zwei Robolink-Robotern von igus automatisiert das System den Ernteprozess, reduziert die Abhängigkeit von Saisonarbeitskräften und schafft eine Grundlage für künftige Fortschritte in der landwirtschaftlichen Automatisierung.
Was ist die Anwendung?
Der Catch-Prototyp automatisiert die Gurkenernte, indem er Gurken in dicht bewachsenen grünen Umgebungen erkennt. Mithilfe der Robolink-Roboter identifiziert und entfernt das System Gurken effizient, wodurch dieser repetitive und wichtige landwirtschaftliche Prozess beschleunigt wird.
Welche Vorteile bietet die Lösung?
Entlastung der Arbeitskräfte: Hilft, Engpässe bei saisonaler landwirtschaftlicher Arbeit zu bewältigen.
Verbesserte Effizienz: Beschleunigt den Ernteprozess im Vergleich zu manuellen Methoden.
Skalierungspotenzial: Bietet eine Grundlage für zukünftige Fortschritte in der landwirtschaftlichen Automatisierung.
Welche Vorteile bietet der Roboter?
Die Robolink-Roboter bringen einzigartige Stärken in die Funktionalität des Catch-Systems ein:
Anpassungsfähigkeit: Fähigkeit, in komplexen und bedeckten Umgebungen zu navigieren.
Präzision: Gewährleistet die genaue Erkennung und Trennung von Gurken.
Robustes Design: Unterstützt weitere Optimierungen für großflächige Innen- oder Außenlandwirtschaft.
Landwirtschaft optimieren mit Robolink-Robotern
Der Catch-Prototyp verdeutlicht das Potenzial der Robotik zur Lösung landwirtschaftlicher Herausforderungen. Obwohl vielversprechend, benötigt die Technologie weitere Verfeinerungen für eine umfassendere Markteinführung. Durch die Automatisierung anspruchsvoller Aufgaben wie der Gurkenernte zeigt Catch die Bedeutung der Robotik für nachhaltige und effiziente landwirtschaftliche Praktiken auf, die Arbeitskräftemangel und betriebliche Ineffizienzen adressieren.
1 Komponente








